Robotec
概要
掘進中のマシン位置をリアルタイムに把握するため、自動追尾可能なトータルステーションでマシン位置を自動測量するシステムです。
特徴
POINT
1シールドマシンを自動計測
POINT
2座標管理による精度確保
POINT
3自動測量による省力化
主な仕様
シールドマシンを自動計測
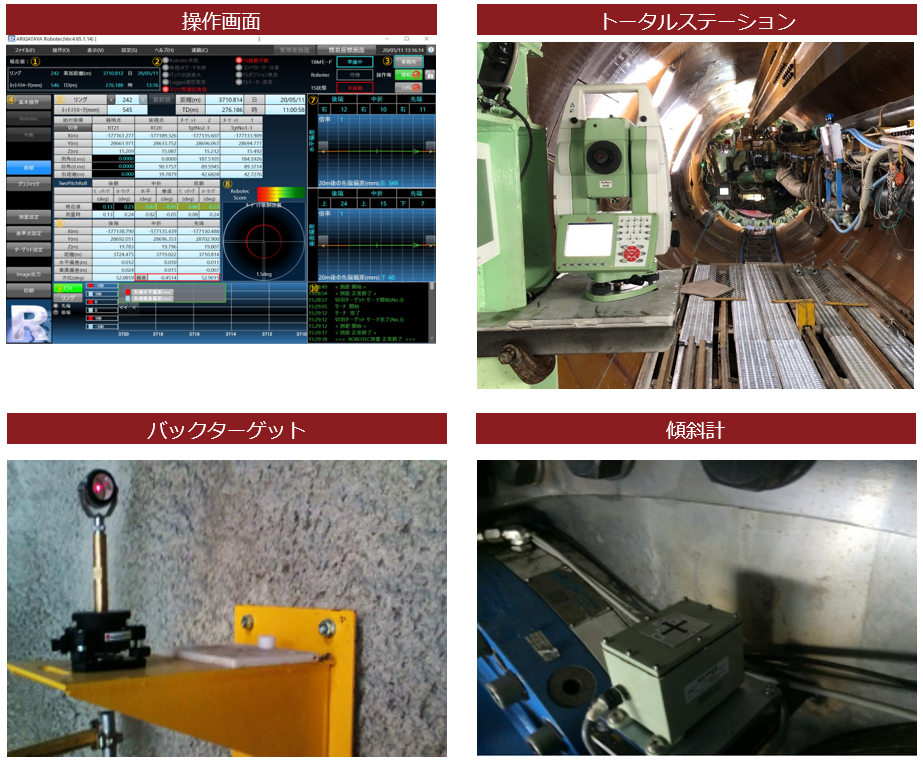
掘進中にトータルステーションでマシン内に設置したターゲットを自動で計測し、マシンの現在位置をリアルタイムに計測・表示することが可能です。
マシン内のターゲットは測量時に自動で開閉することで、誤認を防止します。
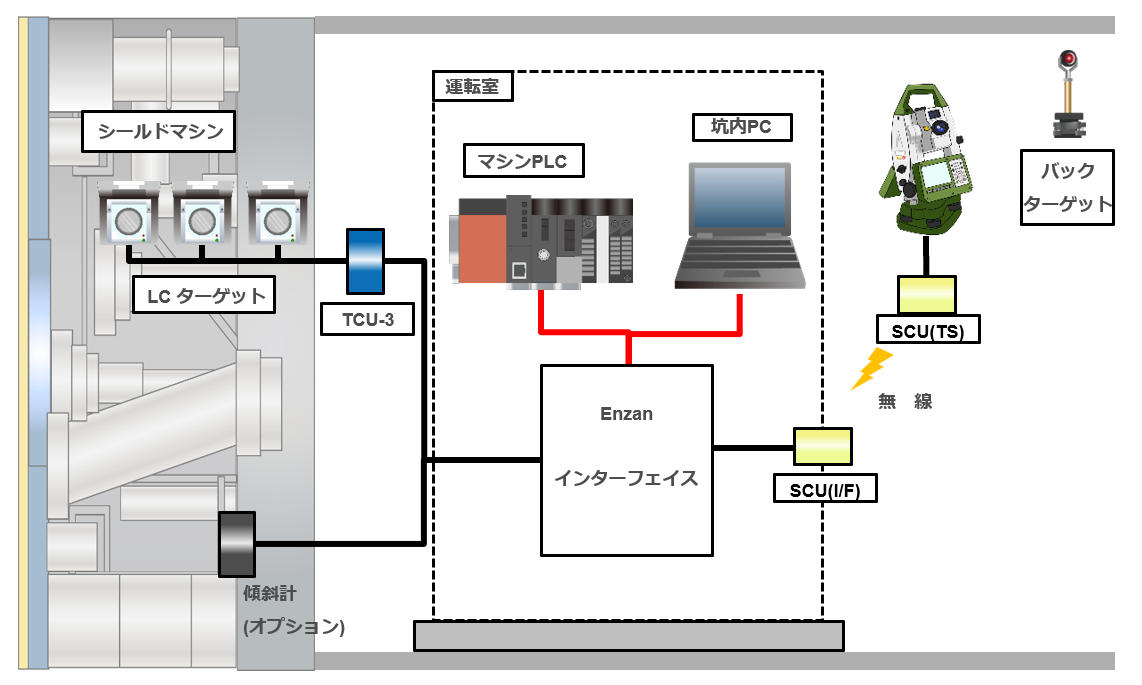
座標管理による精度確保
マシン内へ取り付けたプリズムを計測し、マシンの現在位置を算出します。
リアルタイムで座標管理が可能となり、掘進状況の信頼性が向上します。
自動測量による省力化
自動でマシン測量を行い、片番交代時のマシン測量の削減が可能です。
リアルタイムに座標管理ができ、掘進管理の人員削減が可能です。
導入による効果
掘進中でも実測によるマシン測量が可能なため、正確なマシン位置を把握することが可能です。
実測を行うため、マシン横滑り状態も把握することが可能です。
製品・サービス紹介

分野別


